Algorithm overview¶
Mesh adaptation algorithm¶
Goals¶
Mesh modifications in agreement to a size map
Generation of equilateral elements (possibly in a given metric)
Input data¶
A mesh and, eventually, nodal values prescribing the wanted edge sizes at each node (i.e. a size map).
Steps¶
Surface analysis
- Rough surface mesh modifications for a good ‘samplig’ of the surface:
split too long edges (using patterns)
collapse too short edges
swap too bad elements
- Size map construction:
intersection of the geometric (defined on boundaries) and user-prescribed (defined on the entire mesh) size maps
size map gradation with respect to the prescribed gradation parameter \(h_{\text{grad}}\): \(\frac{1}{h_{\text{grad}}} \leq \frac{l_1}{l_2} \leq h_{\text{grad}}\)
- Fine surface mesh modifications with respect to the size map:
split (using patterns along the surface, and a Delaunay kernel inside the volume) or collape edges
swap edges belonging to too bad elements
vertex relocation to improve the quality
Isovalue discretization algorithm¶
Goals¶
Obtain an explicit mesh of a specific value of an implicit fonction
Input data¶
Nodal values of an implicit function (e.g. the signed distance function)
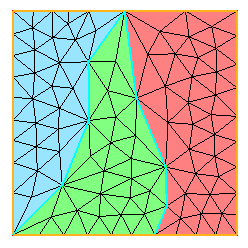
Figure 1: nodal values of a signed distance function at mesh nodes¶
Steps¶
Mark elements intersected by the level-set
- For each marked element :
Mark the edges intersected by the level-set
Insert a new point at the intersection between the level-set and the edge(s)
Split the element using patterns and tag the boundary edge
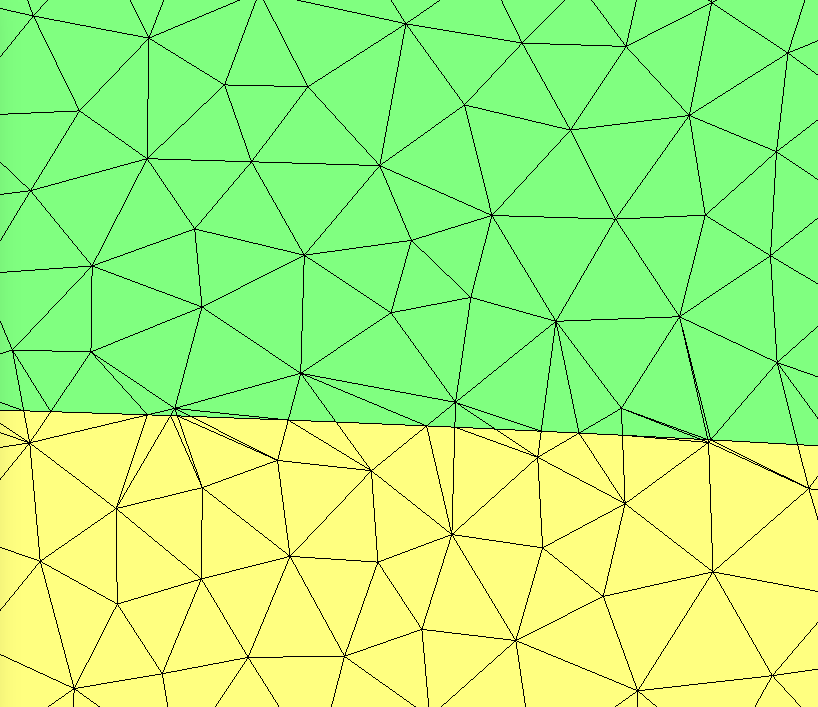
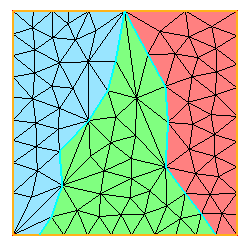
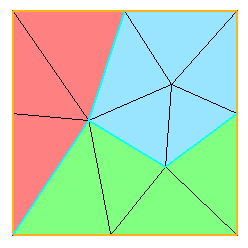
Figure 2: temporary mesh after the level-set discretization¶
Mesh improvement (using the mesh adaptation algorithm).
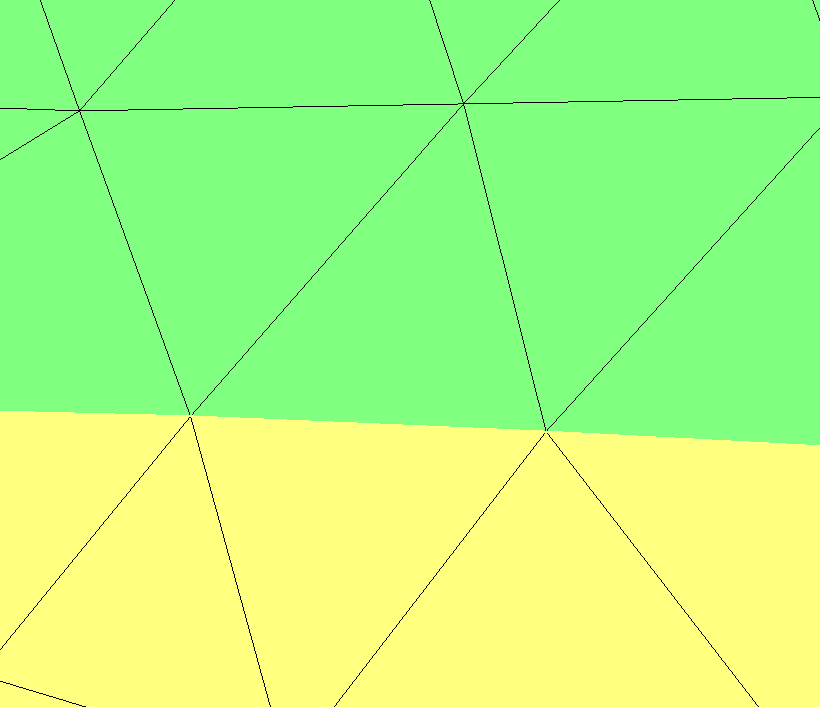
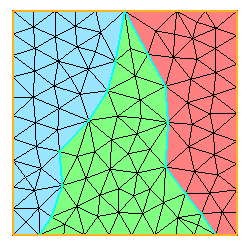
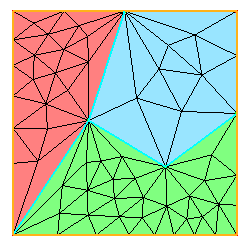
Figure 3: Output mesh¶
Lagrangian movement algorithm¶
Goals¶
Move an object inside a mesh keeping the mesh conformity.
Input data¶
Nodal values of the displacement (velocity) over boundaries of reference 10.
Steps¶
- Extension of the velocity field:
Creation of a submesh containing 20 layers of elements around the boundary to move;
Propagation calling a linear elasticity solver with Dirichlet boundary conditions on the submesh;
- Dichotomy loop:
Computation of the largest valid motion along the velocity field (with point relocation only);
Mesh motion;
Remeshing depending on the lagrangian mode (point relocation, point relocation + edge swapping, point relocation, edge swapping, point insertion and collapse);
go back to step 1.
Distributed memory parallelization algorithm (ParMmg)¶
Goals¶
Mesh adaptation on distributed memory architectures
Steps¶
Mesh distribution: centralized input meshes are partitionned and distribued among available MPI ranks, distributed input meshes are rebalanced;
Mesh subdivision: on each processor, the mesh can be subdivided into sub-meshes (groups);
Mesh adaptation: the sequential remesher Mmg is called on each sub-mesh. Interfaces between the sub-meshes are not authorized to be modified (we say that those interfaces are constrained or frozen);
Interface migration: In order to be able to remesh the constrained interfaces, we create new sub-meshes using a front migration algorithm or a new call to a graph partitionner: interfaces that were frozen during the previous step should be inside the newly defined sub-meshes;
Go to step 3 until reaching the stop criterion (maximal number of iteration).